IROS 2021 THE HILTI SLAM Challenge Champion Algorithm Review
近日我们团队参加的 IROS 2021 The HILTI SLAM 挑战赛获得了最终的冠军。本文是对于本次比赛的算法的实验和思考,版权所有:旷视科技。原文链接:https://zhuanlan.zhihu.com/p/420192586
近日,IROS 2021 The HILTI SLAM 挑战赛公布了竞赛结果,旷视研究院荣获此次挑战赛的冠军。这是继去年包揽 CVPR 2020 SLAM 挑战赛全部赛道的冠军后,旷视研究院再次获得顶会 SLAM 竞赛的冠军。
2021 HILTI SLAM 挑战赛是国际顶级会议——智能机器人与系统国际会议(IEEE/RSJ International Conference on Intelligent Robots and Systems,以下简称IROS)中的一项竞赛,由苏黎世理工和 HILTI 联合举办。IROS 成立于 1988 年,每年举办一次,已发展成为全球规模最大、影响力最强的机器人研究会议之一。

1 赛题介绍
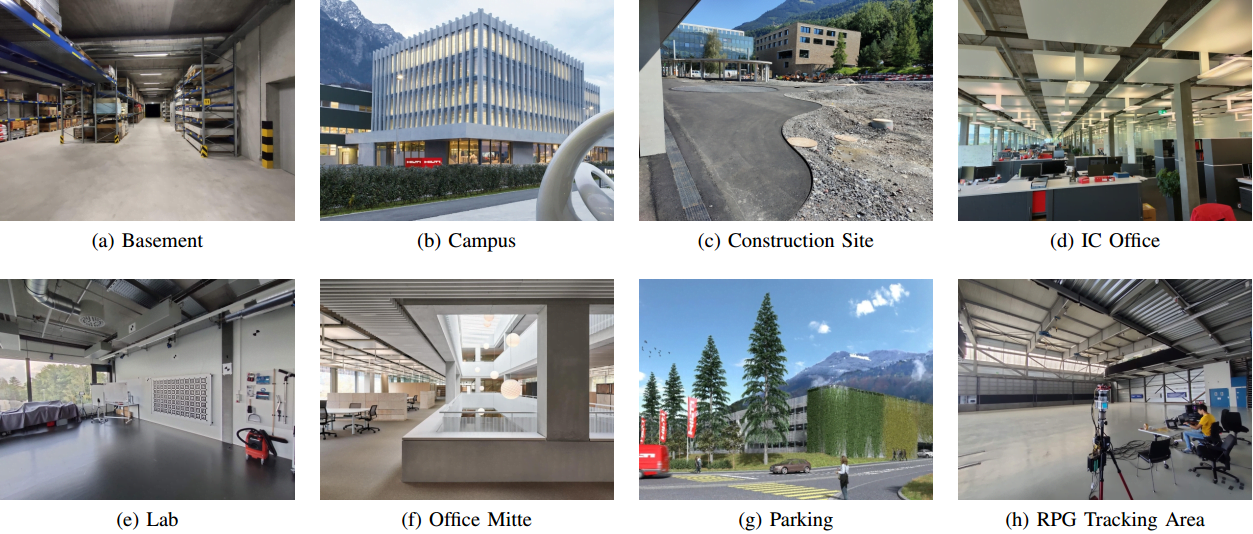
实时定位与地图构建(Simultaneous Localization and Mapping,SLAM)是机器人导航和执行任务所必需的基本能力之一。虽然近些年来基于几何的方法和基于学习的 SLAM 方法都取得较大的进展,但在真实世界中部署一套精准且鲁棒的SLAM算法,仍然是一个具有挑战性的问题。在这次挑战赛中,HILTI 提出了一个新的数据集,包含 12 个序列。每个序列都代表不同阶段的施工现场,如地下室、校园、建筑工地、办公室、实验室、露天停车场等。参赛队伍可以使用数据集中提供的任何传感器设计 SLAM 算法。挑战赛主办方会根据参赛队伍轨迹的完整性和精度进行评分,并按照总分的高低进行排名。
2 旷视夺冠算法揭秘
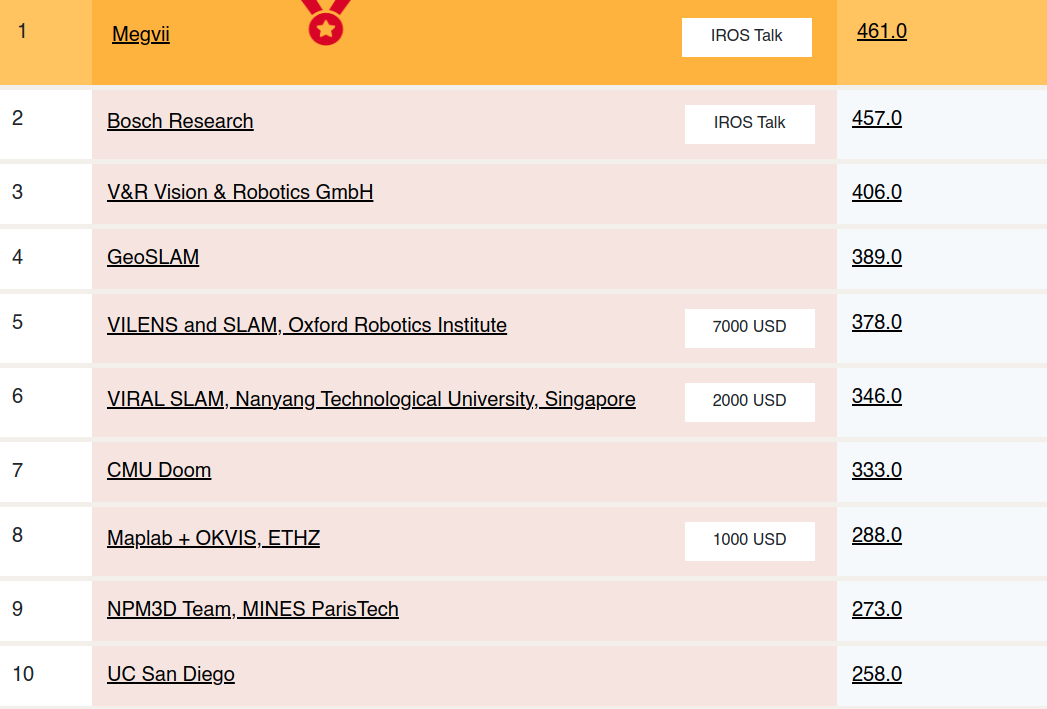
本次比赛吸引了全球20支企业和高校队伍参赛。最终,我们采用基于双激光+IMU 的 SLAM 算法作为参赛方案,经过激烈的竞争最后获得了竞赛冠军。
获奖证书:

Leader Board:
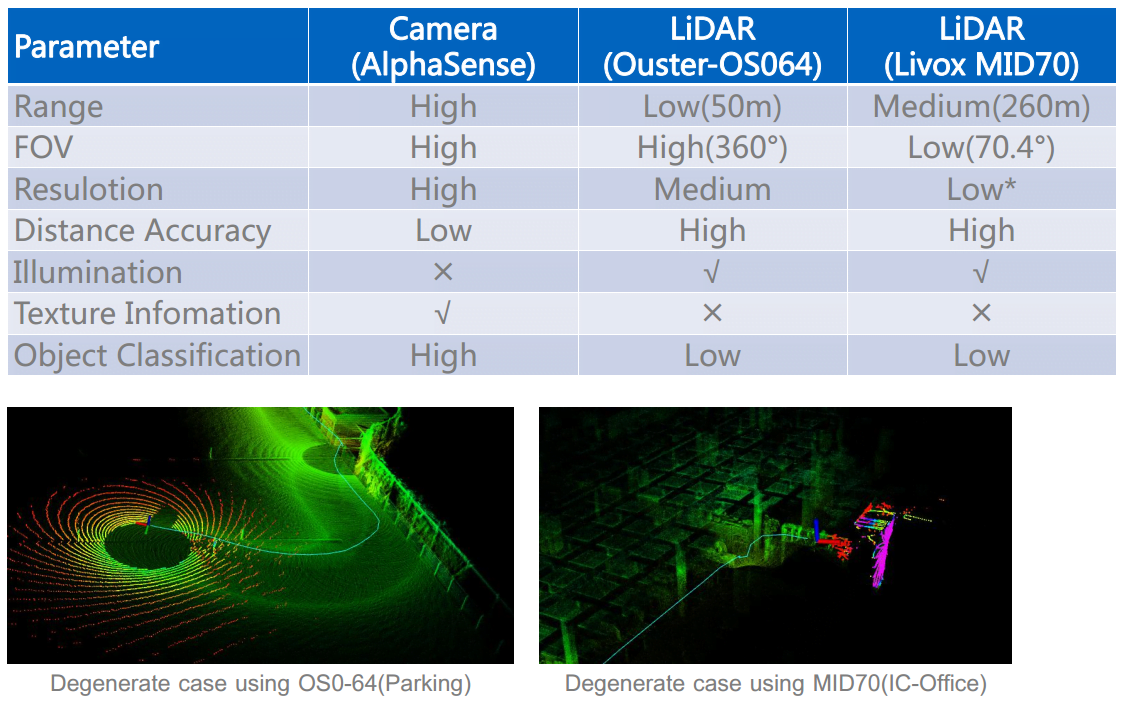
我们分析了比赛数据集提供的传感器信息。其中视觉模块为 SevenSense 的五目相机模组,该模组能够提供丰富的纹理信息,但对光照变化比较敏感,特别是在室外环境。而 3D 激光传感器在不同光照下均能够提供鲁棒和精确的距离测量,更适合该数据集。另外将这5个相机进行融合工作量较大,短期内无法获得一个满意的结果。因此,我们选择 3D 激光雷达作为主要的传感器。
数据集中提供了两个激光雷达,其中 Ouster 具有360度的视场角,能够提供稠密的测量;而 Livox MID70 的视场角仅有70度,但它的测量范围长达260米。使用单一的激光雷达容易出现退化的情况,即使利用 IMU 能够保证短时间内的精度,但整体的定位精度会受到影响。如下图(左),仅使用 Ouster 激光,在空旷的环境中能够定位的特征很少;下图(右),仅使用 Livox 激光,在特定数据集中视野受限。因此,我们最终选择了双激光+IMU的方案。
整体方案如下,这是一个基于滤波的激光惯导里程计:主要分为数据同步、畸变补偿、滤波器的预测更新、地图管理等步骤。
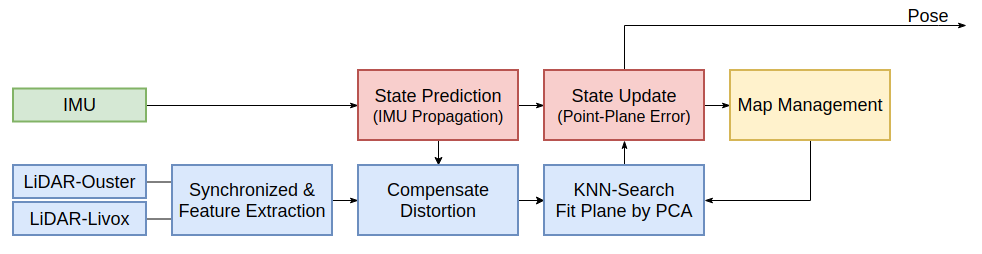
实际数据中,两个激光并不是完全同步的,时间戳相差 10-20ms。因此第一步是将 Livox 的激光点云按照每个点的时间戳重新组织(即切割 Livox 的点云数据),与 Ouster 的时间戳进行对齐。接着在 Ouster 一帧激光的测量时间内,利用 IMU 测量进行状态更新。状态更新的数据可以去点云的运动畸变。然后将 Livox 去畸变的点云转换到 Ouster 坐标系下,与 Ouster 的激光点云进行合并。数据同步步骤尤为关键,大大简化了程序的处理流程。

在滤波器更新阶段,采用点面距离构建测量模型进行更新。其中,每个点对应的平面是根据 K 近邻搜索和 PCA 拟合平面获得的。在获得优化的位姿后,将当前帧的点云转换到全局坐标系下并插入地图中。由于数据集的场景并不算太大(最大的场景为 100*100 米),同时为了程序的效率,我们采用一个增量式的 KD 树维护全局地图。为了保持全局地图的稀疏性,只有离地图中已存在的点较远的点云才可以插入。
3 亮点总结
1 双激光的结合大幅度地提升了程序的鲁棒性和精度;
2 滤波器能够实时估计出IMU的偏置和速度,能够提升畸变补偿的精度,反过来提升定位建图的精度;
3 由于全局地图的存在,不需要回环模块。程序得到了简化。
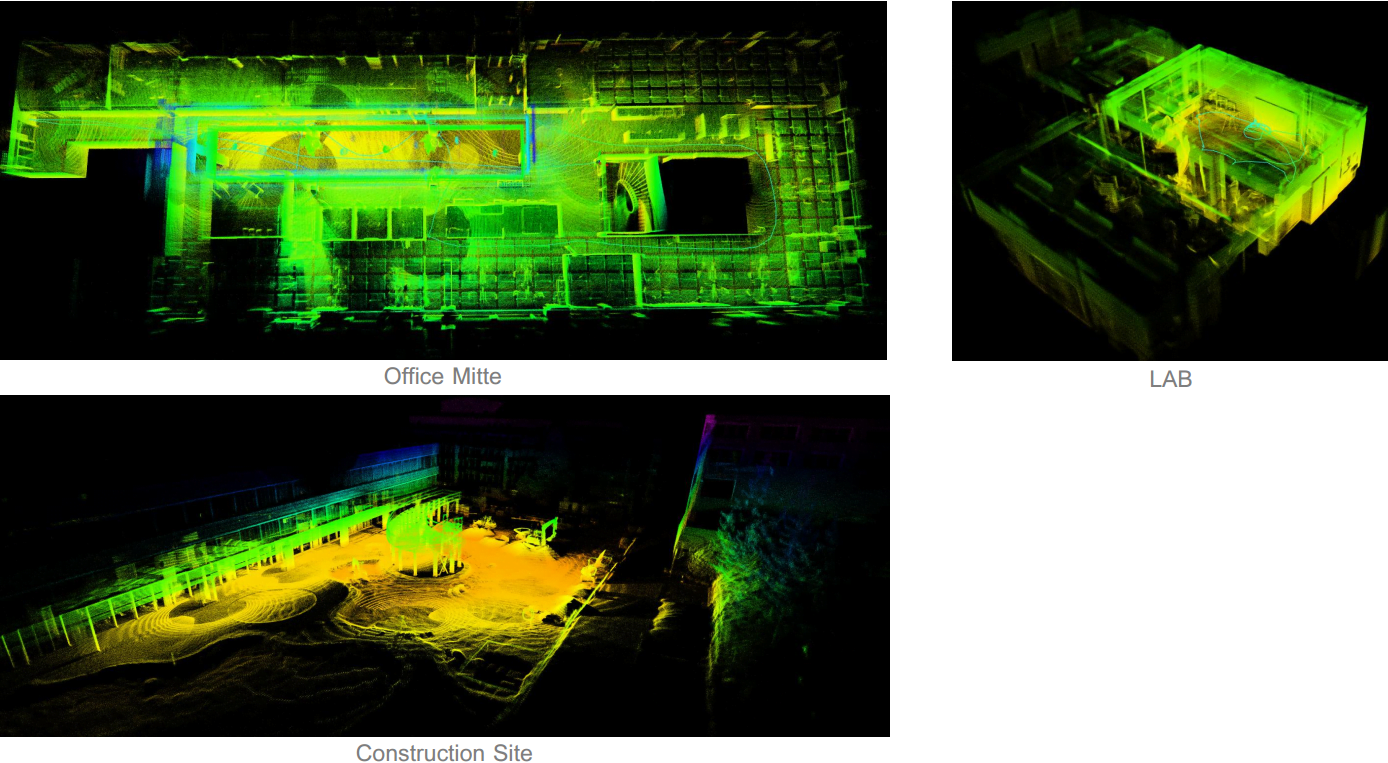
最后为大家展示一下利用算法构建的地图:

参考文献
- Helmberger, Michael, et al. "The Hilti SLAM Challenge Dataset." arXiv preprint arXiv:2109.11316 (2021).
- Xu, Wei, et al. "Fast-lio2: Fast direct lidar-inertial odometry." arXiv preprint arXiv:2107.06829 (2021).
- Zhang, Ji, and Sanjiv Singh. "LOAM: Lidar Odometry and Mapping in Real-time." Robotics: Science and Systems. Vol. 2. No. 9. 2014.
- Hackel, Timo, Jan D. Wegner, and Konrad Schindler. "Fast semantic segmentation of 3D point clouds with strongly varying density." ISPRS annals of the photogrammetry, remote sensing and spatial information sciences 3 (2016): 177-184.
- Cai, Yixi, Wei Xu, and Fu Zhang. "ikd-Tree: An Incremental KD Tree for Robotic Applications." arXiv preprint arXiv:2102.10808 (2021).
- Mourikis, Anastasios I., and Stergios I. Roumeliotis. "A multi-state constraint Kalman filter for vision-aided inertial navigation." Proceedings 2007 IEEE International Conference on Robotics and Automation. IEEE, 2007.