ISMAR 2015 重点文章介绍&下载汇总
ISMAR 2015 上有不少很有趣的文章和 Demo 演示,Khronos Group (开发 OpenGL 的组织)给我们推荐了以下几篇值得关注的文章,有兴趣的研究人员可以阅读。
我也把这些文章列在这里,并把原文下载也提供,有空的时候开始研究下~~
1、Very High Frame Rate Volumetric Integration of Depth Images on Mobile Devices
文章:kaehler15infinitam.pdf
网站:http://www.robots.ox.ac.uk/~victor/infinitam/
源码:http://github.com/victorprad/InfiniTAM
University of Oxford
- 320 × 240 depth images at 47 Hz on a Nvidia Tegra K1, 20 Hz on an iPad Air 2
- Optimized implementation is available online at http://www.infinitam.org
- Smart optimizing decisions through implementation
- Uses GPU compute through OpenGL ES Shaders
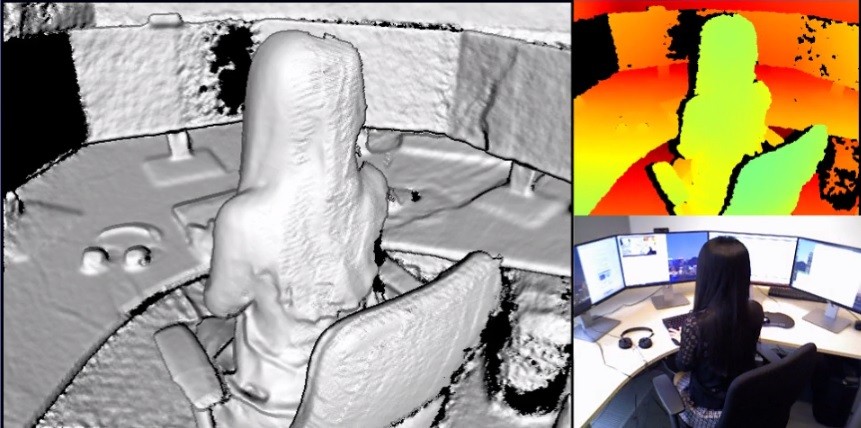
2、MobileFusion: Real-time Volumetric Surface Reconstruction and Dense Tracking On Mobile Phones
文章:2015ISMAR_ondruska.pdf
网站:暂无
源码:暂无

- University of Oxford with Microsoft funding
- First pipeline for real-time volumetric surface reconstruction and dense 6DoF
camera tracking running purely on standard, off-the-shelf mobile phones. Using
only the embedded RGB camera, our system allows users to scan objects of
varying shape, size, and appearance in seconds, with real-time feedback during
the capture process
- Impressive model quality
captured very quickly
3、Instant Outdoor Localization and SLAM Initialization from 2.5D Maps
文章:arth_ismar15.pdf
网站:https://cvarlab.icg.tugraz.at/publications#Arth15
源码:暂无
![]()
Graz University of Technology, Austria
- Instantaneously initialize and globally register a SLAM map by localizing the first
keyframe with respect to widely available untextured 2.5D maps. Given a single
image frame and a coarse sensor pose prior, our localization method estimates
the absolute camera orientation from straight line segments and the translation
by aligning the city map model with a semantic segmentation of the image